Journal
A Trajectory-level Robot Skill Learning Method Based on Fuzzy Systems
SCIENCE CHINA Information Sciences.
Chao Zeng, Zhen Deng, Boyang Ti, Yongsheng Gao
Info
Cite
Human Intention Understanding From Multiple Demonstrations and Behavior Generalization in Dynamic Movement Primitives Framework
IEEE Access (2019)
Boyang Ti, Yongsheng Gao, Qiang Li, Jie Zhao
Info
Pdf
Cite
Conference
Obstacle Avoidance Methods Based on Geometric Information Under the DMPs Framework
International Conference on Intelligent Robotics and Applications (ICIRA) (Oct. 2021)
Ming Shi, Yongsheng Gao, Boyang Ti, Jie Zhao
Info
Cite
Dynamic Movement Primitives for Movement Generation Using GMM-GMR Analytical Method
2019 IEEE 2nd International Conference on Information and Computer Technologies (ICICT) (Mar. 2019)
Boyang Ti, Yongsheng Gao, Qiang Li, Jie Zhao
Info
Cite
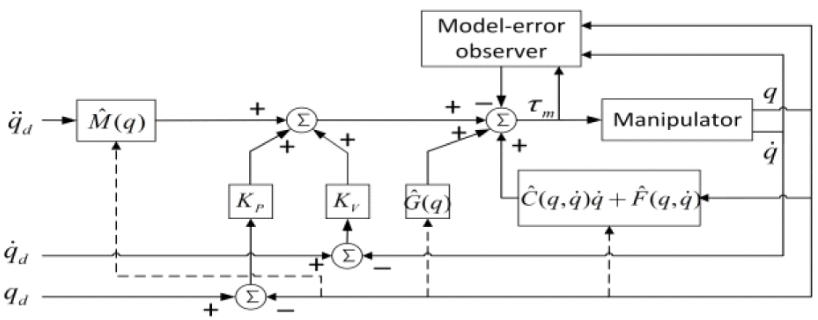
Model-Error-Observer-Based Control of Robotic Manipulator with Uncertain Dynamics
2019 IEEE 2nd International Conference on Information and Computer Technologies (ICICT) (Mar. 2019)
Qiang Li, Yongsheng Gao, Boyang Ti, Jie Zhao
Info
Cite